
Die Kombination von Allrad und Torque Vectoring schafft verblüffend mehr Sicherheit und Fahrspass
Schon wieder so eine neudeutscher Ausdruck: „Torque Vectoring“! Kann man dass denn nicht auf Deutsch sagen? Leider nein bzw. schwächer aussagekräftig. Das Deutsche Wort heisst, weniger sexy, einfach „Drehmomentverteilung“. Was dem Begriff „Torque Vectoring“ aber nicht richtig gerecht wird. Vectoring ist im englischen die dynamische Ausrichtung einer Grösse, hier in unserem Fall, eines Drehmomentes in eine bestimmte Richtung. Ich würde es also lieber mit „dynamischer Drehmoments-Ausrichtung und Verteilung“ übersetzen. Was wesentlich länger ist, als „Torque Vectoring“. Da das schneller gesagt und geschrieben und auch noch international verständlich ist, verwendet man heute solche Ausdrücke. Hört sich aber auch noch cool an, finde ich.
Aber was ist „Torque Vectoring“ überhaupt?
Von dem primären Antriebsstrang eines Motors, in einem Auto werden zu verschiedenen Zeiten unterschiedlich grosse Drehmomente über Achsen auf die Räder übertragen. Das Drehmoment definiert sich ja aus Kraft mal Länge des Hebelarms. Wie wir alle wissen, drehen sich die Räder eines Autos in Kurven unterschiedlich schnell. Die äusseren Räder drehen sich schneller als die inneren. Und je nach Fahrsituation drehen sich die vorderen Räder schneller als die hinteren oder umgekehrt. Das heisst in einem Allradauto drehen sich, fast immer, alle Räder unterschiedlich schnell.
Die Kraft die über die Achsen auf die Räder übertragen werden, erzeugen durch den Hebel (dem Raddurchmesser) ein Drehmoment am Profil an dem der Wagen den Untergrund berührt. Also an dieser Stelle die Traktion erzeugt. Je besser die Traktion an jedem Rad zu jeder Zeit ist, egal ob beschleunigt oder verzögert wird, desto sicherer fährt das Auto auf allen Untergründen und zu jeder Zeit.
Bei der Verzögerung sorgt heute meist das ABS – System elektronisch gesteuert für den absolut optimalen Gripp an jedem Rad zu jeder Geschwindigkeit. Beim Beschleunigen ist das aber schwieriger.
Bei herkömmlichen Systemen, z.B. einem front- oder heckgetriebenen Fahrzeug, sorgen nur zwei Räder für den Vortrieb, die anderen schaffen dabei passive Traktion. Zwischen den beiden angetriebenen Rädern sorgt heute normalerweise ein Differential für die Verteilung des Drehmoments auf die beiden Räder. Ein Differential hat aber verschiedene Nachteile. Zum Beispiel hat es einen Wirkungsgrad, der Energie schluckt und nicht alle Leistung, die vom Motor kommt, auf die Räder bringt. Auch ist die Verteilung des Drehmoments eher statisch als dynamisch – es dauert ein bisschen bis das Optimum eingestellt ist. Die Zahnräder und das System des Differentials selber sorgt für eine gewisse Trägheit bei der Verteilung des Drehmoments. Natürlich hat man versucht mit Sperrung eines Teils des Differentials das Drehmoment besser auf die Räder zu übertragen, aber selbst mit Elektronik und Software bietet das kein Optimum. Und, last but not least, verbraucht ein Differential viel Platz.
Bei aktuellen Allradantrieben – selbst der berühmten Fahrzeuge, die Ski-Pisten rauf fahren können sollen – setzt man Differentiale ein und verteilt dann mit Elektronik das Drehmoment auf alle Räder. Die Verteilung mittels der Elektronik wird von vielen Faktoren beeinflusst und die Entscheidung des Computers wird in Millisekunden berechnet. Geschwindigkeit, Beschleunigung, Verzögerung, Traktion eines jeden Rades und noch viel mehr werden dazu herangezogen. Dabei kann man aber nicht bei jeder Fahrsituation das Drehmoment an jedem Rad genau oder schnell steuern wie man gerne möchte. Das Differential ist zu träge, da in ihm Massen (Zahnräder) bewegt werden. Also gibt es dann feine aber erkennbare Leitungsminderungen in bestimmten Situationen.
Torque Vectoring durch Twinster-AWD System
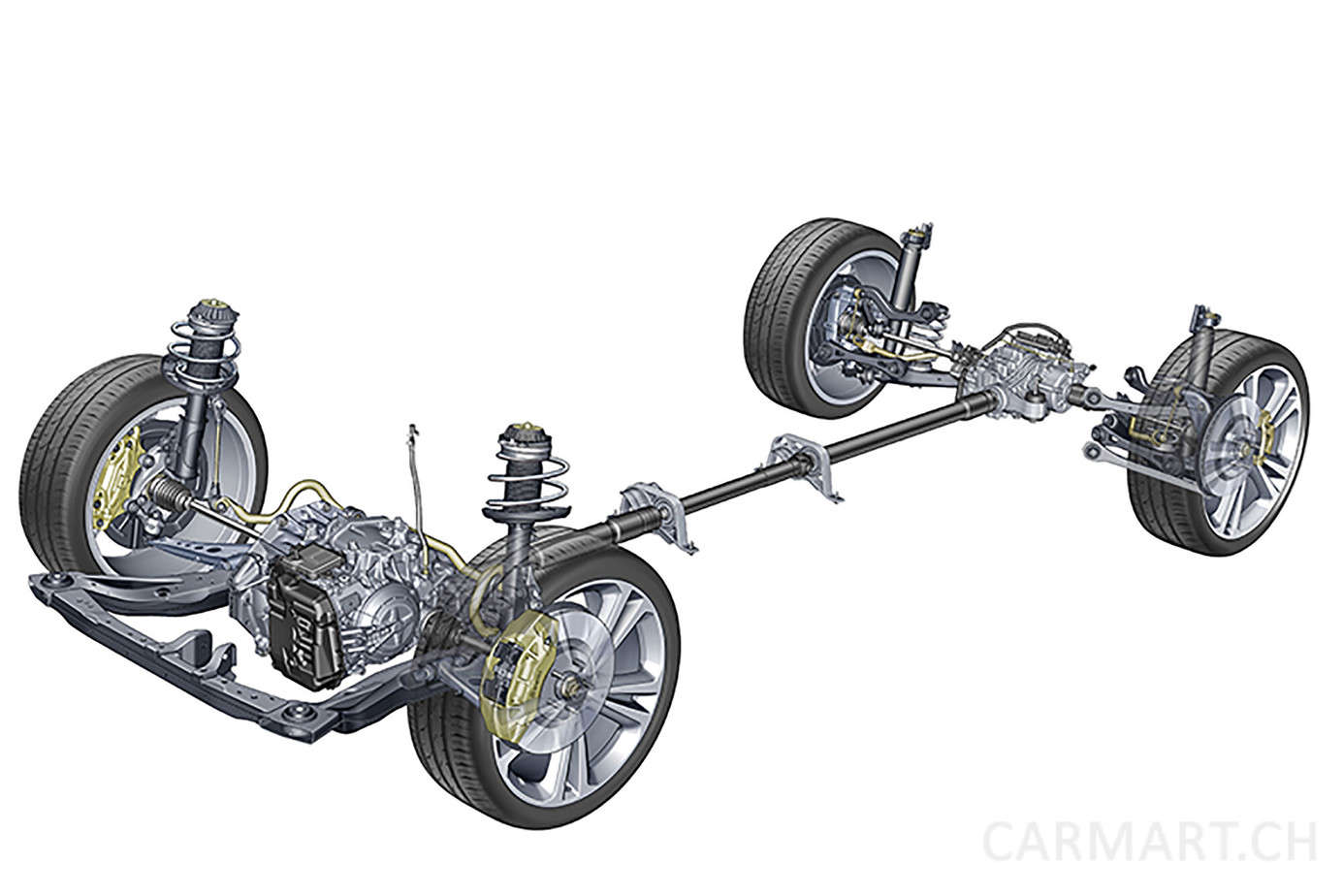
Im Opel Insigina 4×4 wird eine neue Methode der Drehmomentsverteilung verwendet, die weit besser funktioniert, leichter zu steuern und viel moderner ist, als die Verteilung des Drehmoments über ein oder mehrere Differentiale. Im Insignia wird das Twinster-AWD System verwendet.
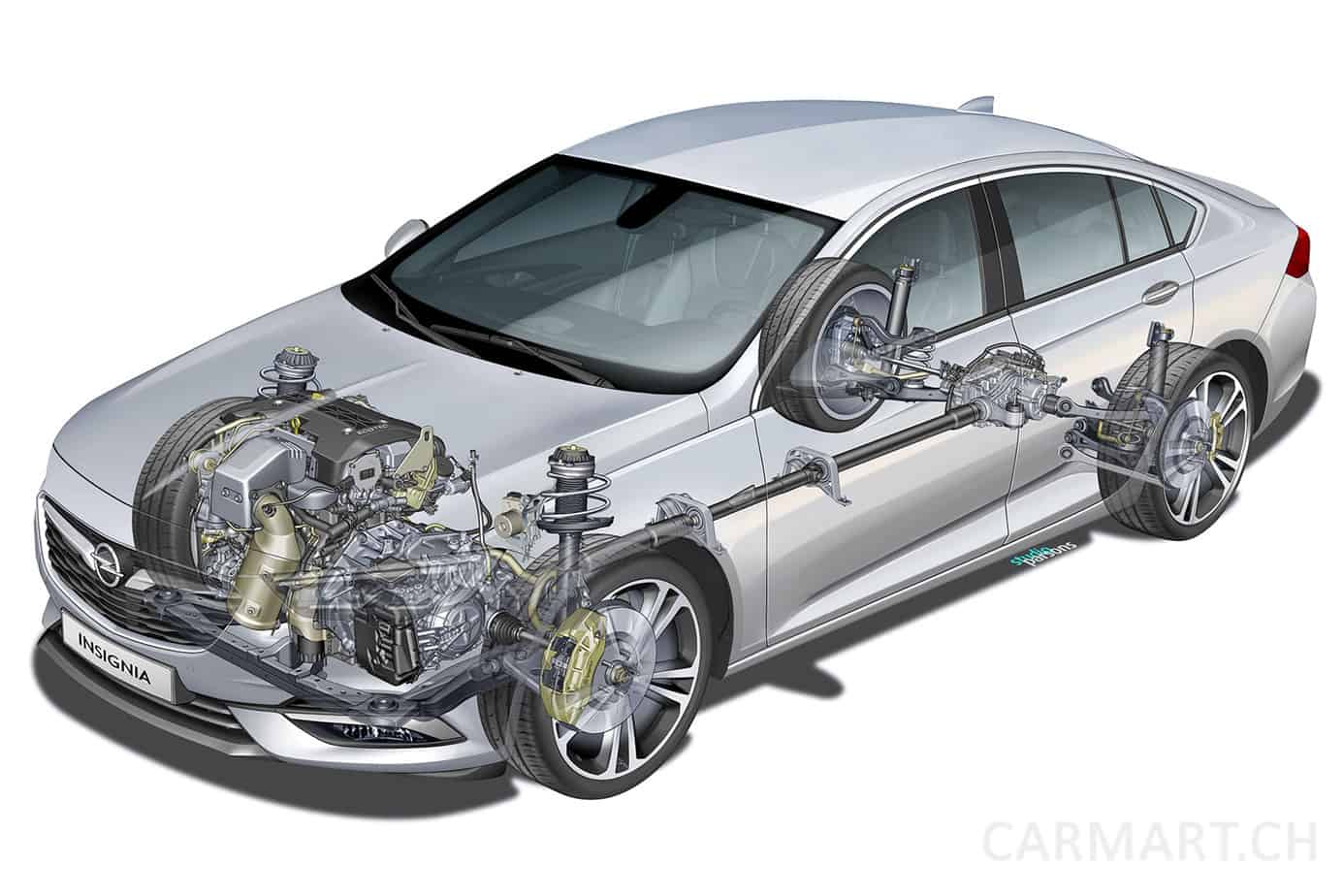
Bei dem Twinster-AWD System werden zwei Kupplungen bereits vor den Antriebswellen eingesetzt, die die Drehmomentsverteilung auf die Räder gewährleisten und steuern. Ein Differential zwischen den Hinterrädern ist nicht mehr nötig – es entfällt. Über die Elektronik, die verschiedenste Werte von den Sensoren erfasst, kann dadurch das Drehmoment optimal und feiner auf die Räder übertragen werden als bei herkömmlichen Systemen. Dabei spart man nicht nur viel Gewicht ein, dass sonst ein Differential hat, man kann zusammen mit den verschiedenen Fahrmodi richtige Kunststücke ermöglichen. Mit dem Opel 4×4 Insignia kann man sogar deshalb driften. Was mit anderen Allradfahrzeugen nicht möglich ist. Vor allem aber erhöht man die Sicherheit die Traktion der Reifen zu jeder Zeit zu gewährleisten. Was wiederum ein viel besseres Fahrverhalten auf schlechten Untergründen und bei höheren Geschwindigkeiten bedeutet.
Opel schreibt dazu auf seinem Blog:
Dadurch dass die beiden gleich großen Kupplungen vor der Antriebswelle der beiden Hinterräder individuell ansteuerbar sind, wird in Sekundenbruchteilen mehr Moment auf das kurvenäußere Rad geleitet. So kann je nach Wunsch ein Drift eingeleitet oder ein „Ausrutscher“ korrigiert werden. Fahrspaß pur bei hoher Fahrsicherheit.
Wir hatten Gelegenheit das System auf Schnee und Eis zu testen und müssen bestätigen, dass es extrem sicher, schnell und zuverlässig ist. Noch nie konnten wir ein Auto mit der Grösse und dem Gewicht so sauber, sicher, präzise und vor allem schnell auf Eis und Schnee fahren, wie mit dem Insignia 4×4. Das gesamte Fahrverhalten in allen Fahrmodi (sport, normal, tourer) lässt sich auf unsicheren Untergründen als leicht zu beherrschen bezeichnen. Man muss da schon mit der Brechstange oder zu hoher Geschwindigkeit hantieren um das Auto ausbrechen zu lassen. Opel hat damit einen grossen Schritt zu einem optimalen Fahrwerk vollzogen.



{kind=link}